Non-Traditional Robotic Tooling Applications
Most applications today incorporate both robotic and fluid power components. Using these two technologies can produce the fastest ROI in today’s marketplace. When you think about robot applications, the first thought is how to pick up the product using the robot. This is where many electrical and pneumatic actuators come into the design process.
We have done almost every type of EOAT solution you can think of on a robot. We use pneumatic grippers to keep the force and moment high while keeping the weight down. This is just one way. Often, we create elaborate designs in which pneumatic slides, rotaries, and cylinders are used. With increasingly more of the applications, we find the traditional grippers are not going to solve the problem alone. The mix of these various product families act like an erector set. Using standard products, you can easily pull down these products from the CAD library and start to lay out the concept.
Here are a few examples of these non-traditional types of EOAT applications.
 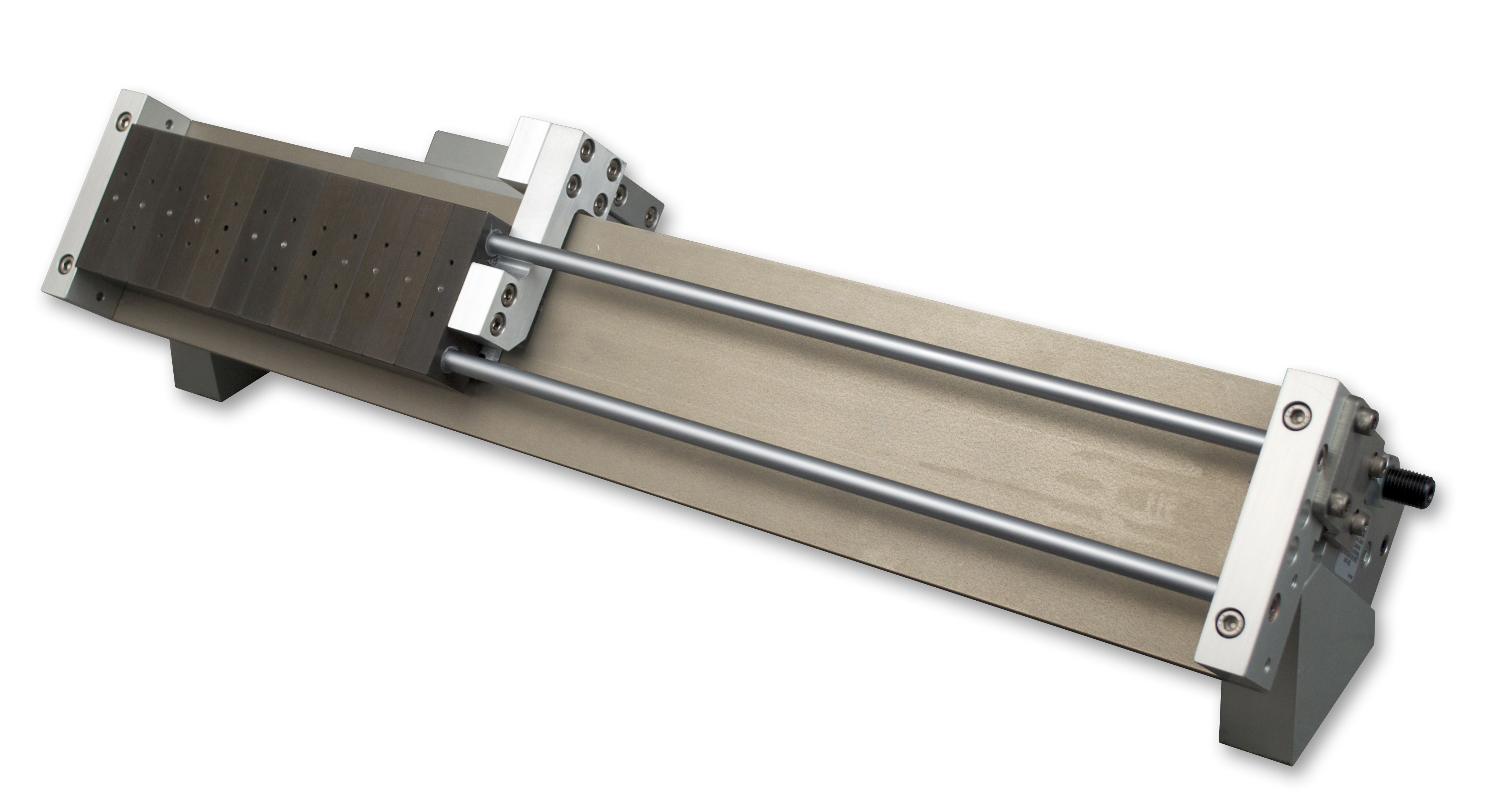
Pneumatic Pick Head - ML313108
- Pneumatically changes pitch
- Lower cost than electric pick head
- Easy installation
- Customer-specified pitch and number of heads

Multiple Part Handling Actuator - ML308793
- Each finger pad supports gripping device
- Used to pick array of parts and opens for ease of assembly
- Increased production throughput
- Ideal for automotive assembly and placement of fasteners
- Jaws can be individually adjusted to eliminate backlash
- Other jaw configurations available, consult PHD Custom Products
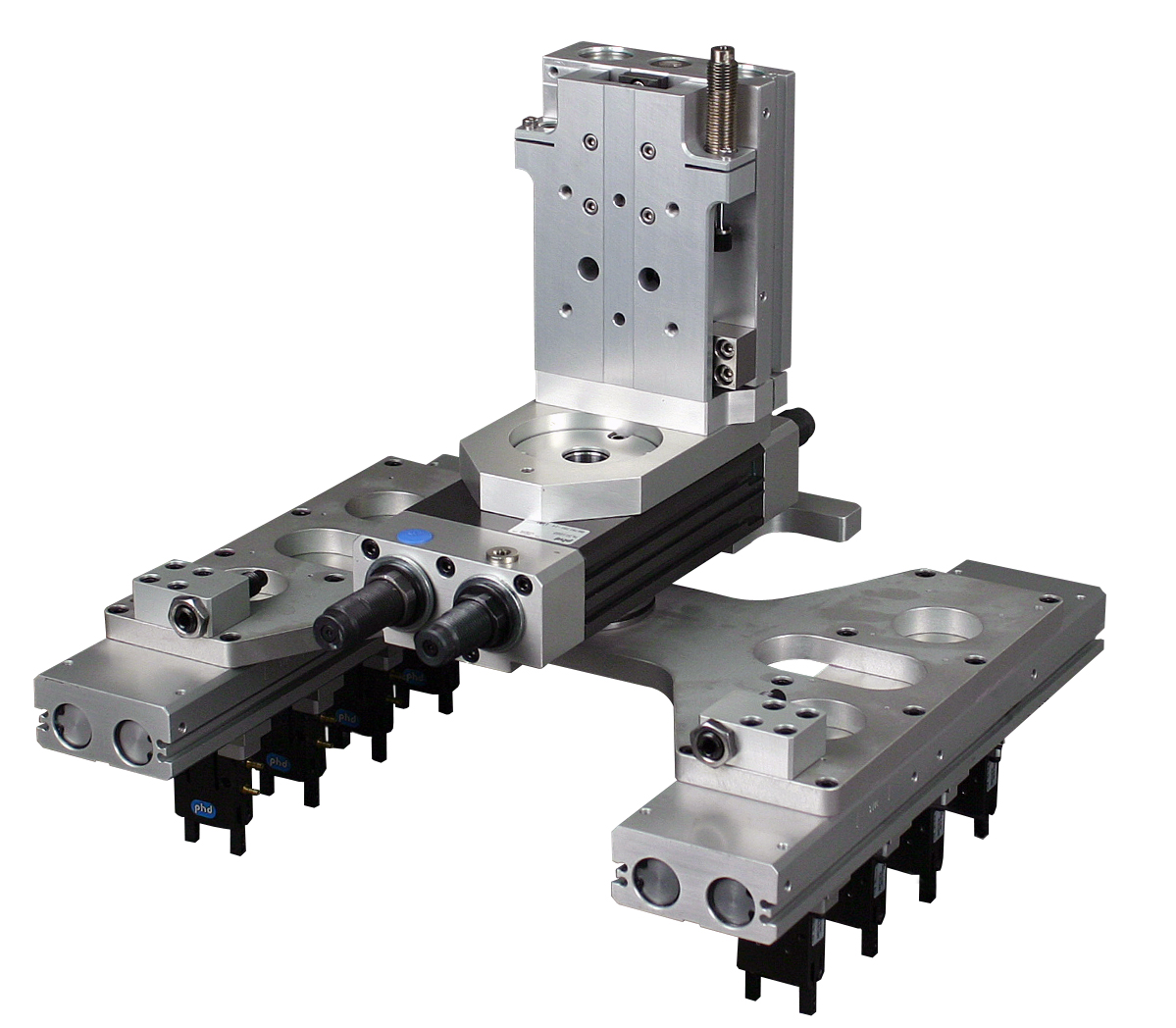
Modular Multi-Axis Part Handling Device - ML311181
- Unique mounting plate configuration mounts to other new PHD components
- Flexibility on changing part pick up points with precision
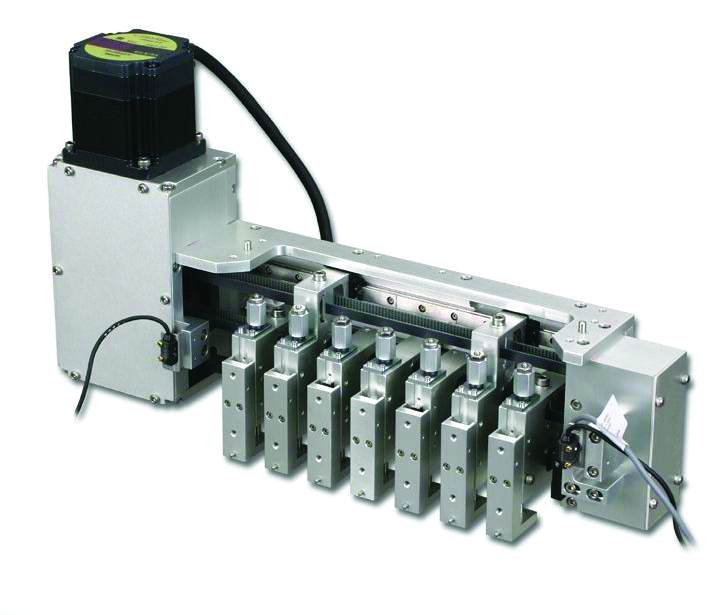
Electric Variable Pick Head - ML306079
- Ideal for final packaging process
- Motor driven pitch
- Pneumatically driven vertical slides
- Used in semiconductor industry
- Other configurations available
As more of PHD’s products are used in the robot space, we will continue to develop new EOAT systems for the robot market. As industry continues into the automation “boom”, as it has been called, we will be ready for the new challenges the robot market presents. As industry continues to grow, automation needs to as well. PHD is ready for the new challenges the robot market presents.
Complete Cartesian Systems

 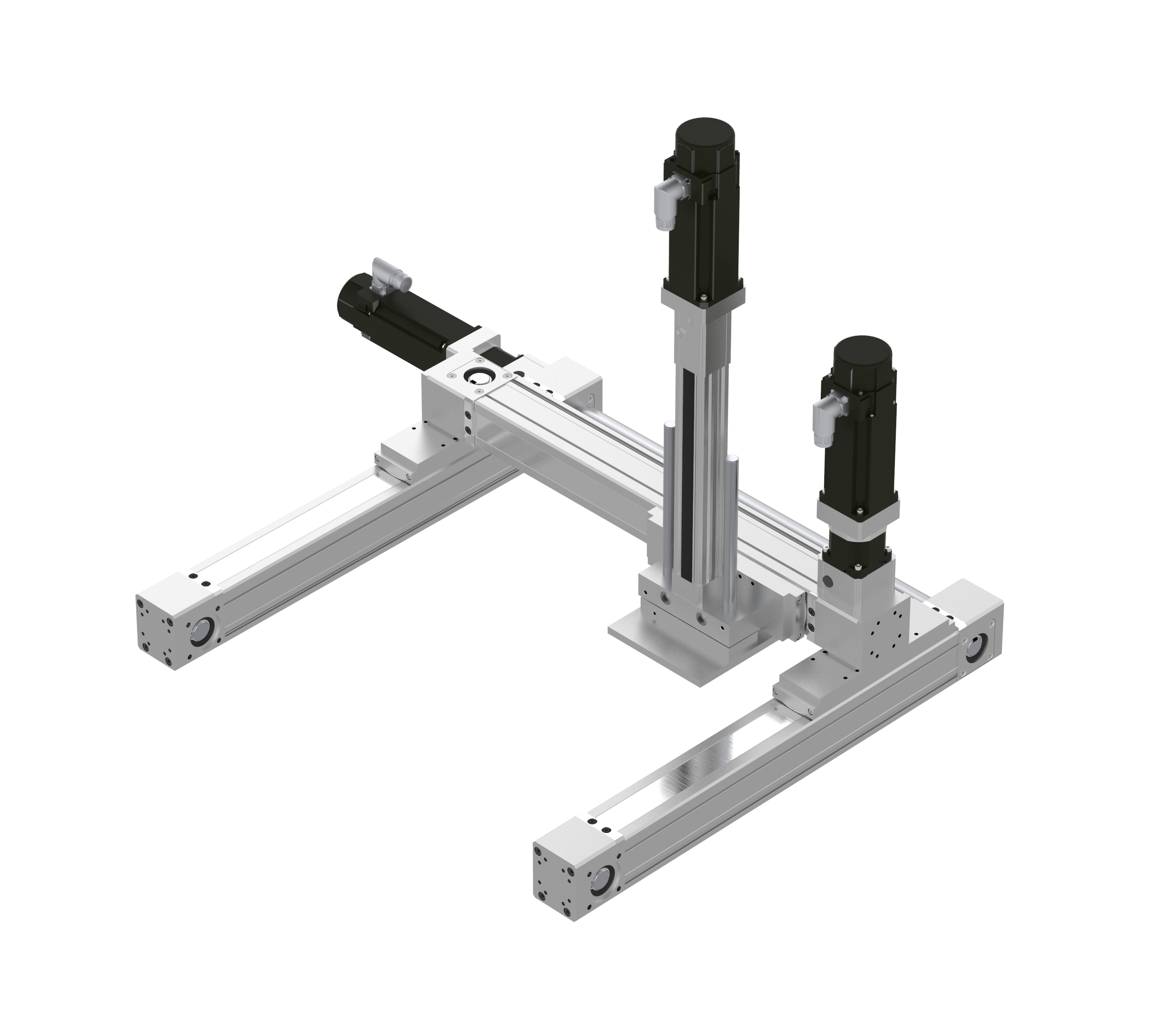
PHD’s Cartesian systems are precise and can handle high payloads and accommodate longer travels than competing units. Complete Cartesian systems are available via Unlimited Engineering and are used in a wide range of applications such as pick-and-place applications, which can require up to three axes of motion (X, Y and Z).
PHD Cartesian systems are designed and optimized for specific applications and are simple to maintain. With PHD’s YMYW (Your Motor, Your Way) motor mount system, these robotic systems can be powered by any motion control system and communication protocol for PLC compatibility.

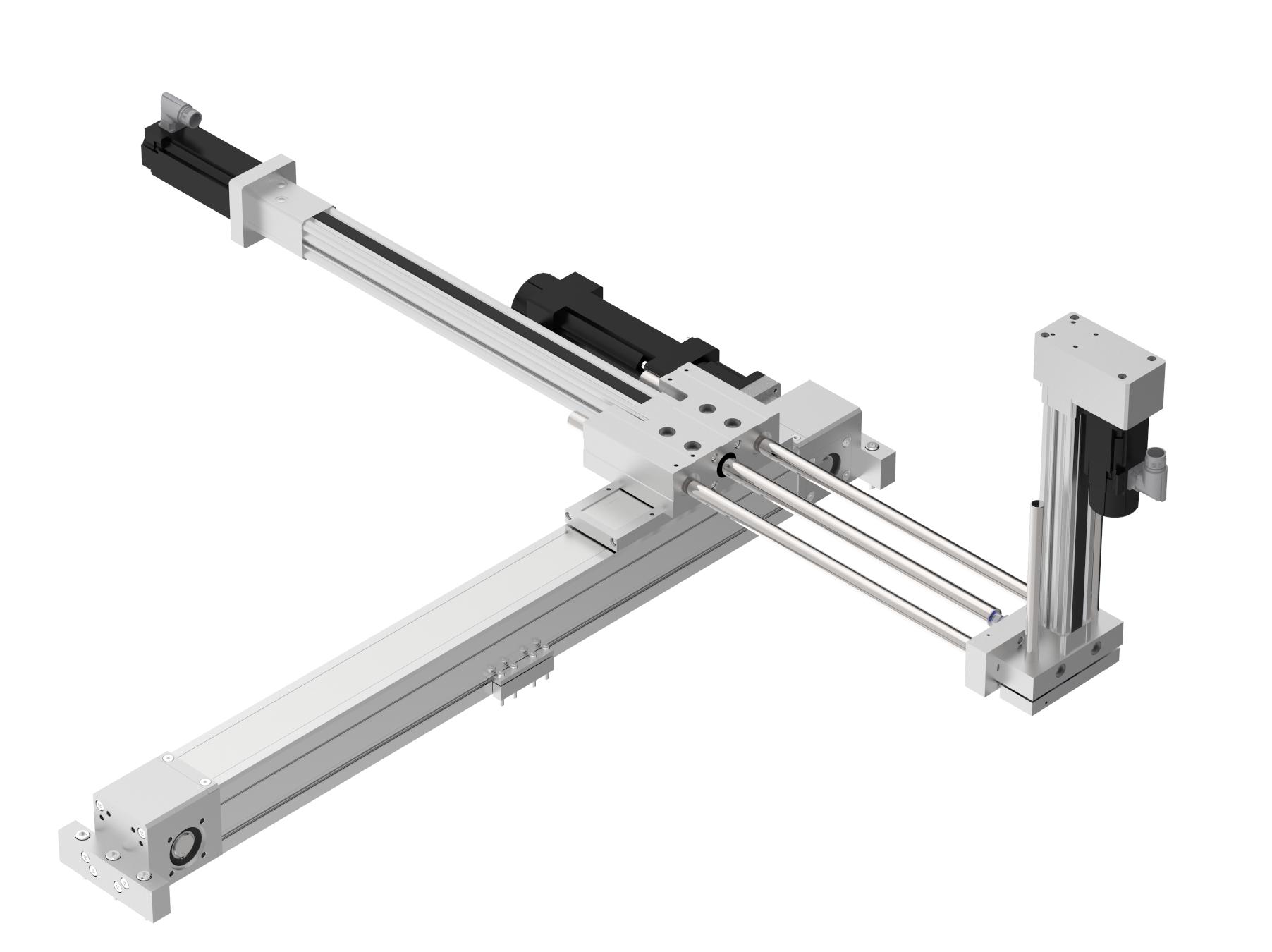
Here is an example of a gantry system for a pick and place application built by PHD. The application required longer travels and higher speeds, so the belt-driven ESU actuators were chosen for the building blocks of the design. A key feature for the customer was ease of integration and installation, so PHD supplied aluminum extrusion to support all axis. This allowed simple mounting of the system only requiring two contact points on both X and X' axes.
Modular 7th Axis Linear Actuator for UR, Omron TM, and Hanwha Robots
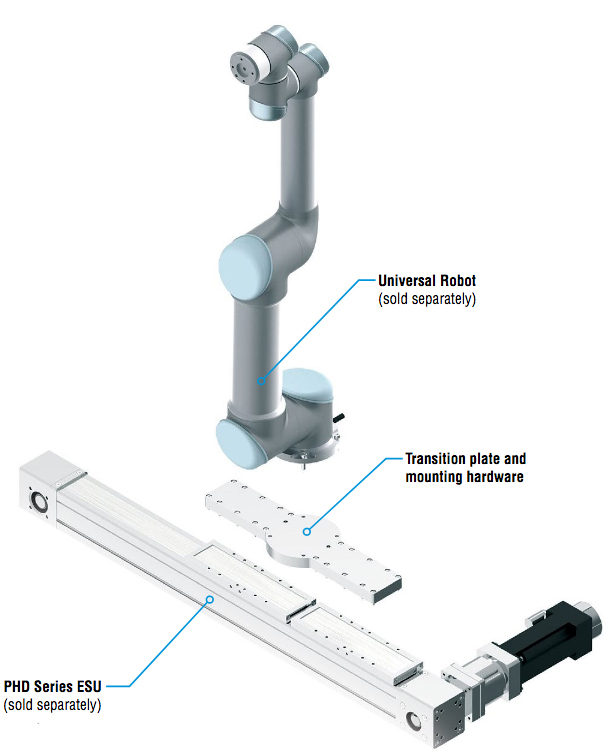
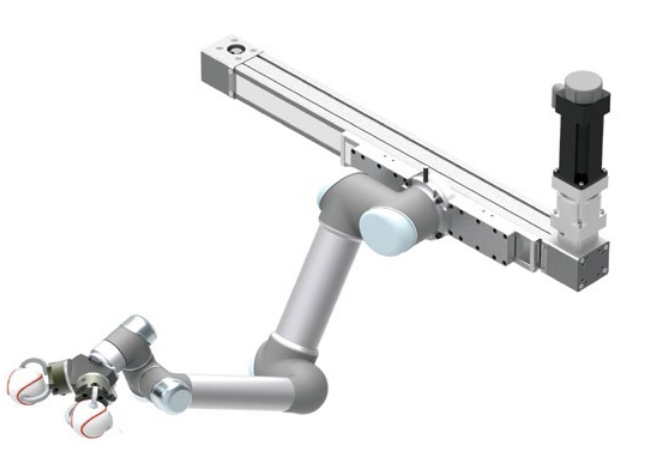
This is a modular 7th axis linear actuator solution designed exclusively for UR, Omron TM, and Hanwha robots. The robust design of the Series ESU Electric Belt-Driven Linear Actuator provides a superior guide system to support the robot in various orientations. Vertical, overhead, or wall mounted applications are achievable with the ESU.
Transition plates and hardware are available for direct mounting between electric linear actuator and robot.
Torque limiting features on servo-driven linear actuator can provide faults in case of collisions.
With a maximum stroke of 5,500 mm, the 7th axis linear actuator can multiply the working area of the robot tenfold.
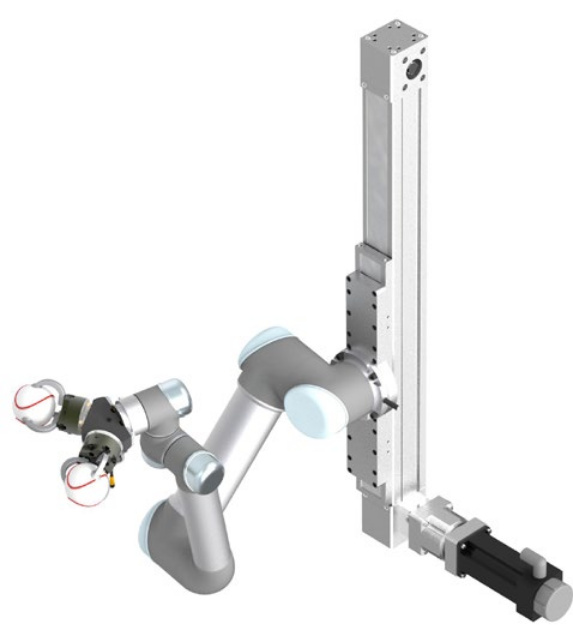
Vertical Mounting

Overhead Mounting
Wall Mounting
| 

